はじめに
これまで、下記の投稿に ESP32 x NuttX を使ったビルド方法について記載していました。
- NuttX ビルトインアプリケーションの作成
- NuttX ESP32 アプリケーションのDockerビルド
- NuttX ビルトインアプリケーションの自動起動
- ESP-IDF で hello world
当時、試行錯誤しながら作成したため、内容が分散されており改善が必要な部分もありましたので、改めてプロジェクトを作成し説明を作成しました。
使用したハードウェア
ESP32-WROOM-32E を使用した、ESP32-DevKitC というシングルボードコンピュータのキットを使用しました。


ソフトウェア開発環境
ここではWSL等を使用しない、ネイティブのUbuntu環境を前提とします。
- Ubuntu 22.04
- Docker
- Python3
- Python3-venv
ただ、ネイティブの環境を前提としているのはFlashROMの書き込みの際、ハードウェアへのアクセスを直接行うことで手順をシンプルにしたい為です。 下記のようにFlashROMの書き込みはWindows環境で行う、またはWSLからハードウェアにアクセスするような仕組み(usbipd-win等)を使うことで、WSLも使用可能です。
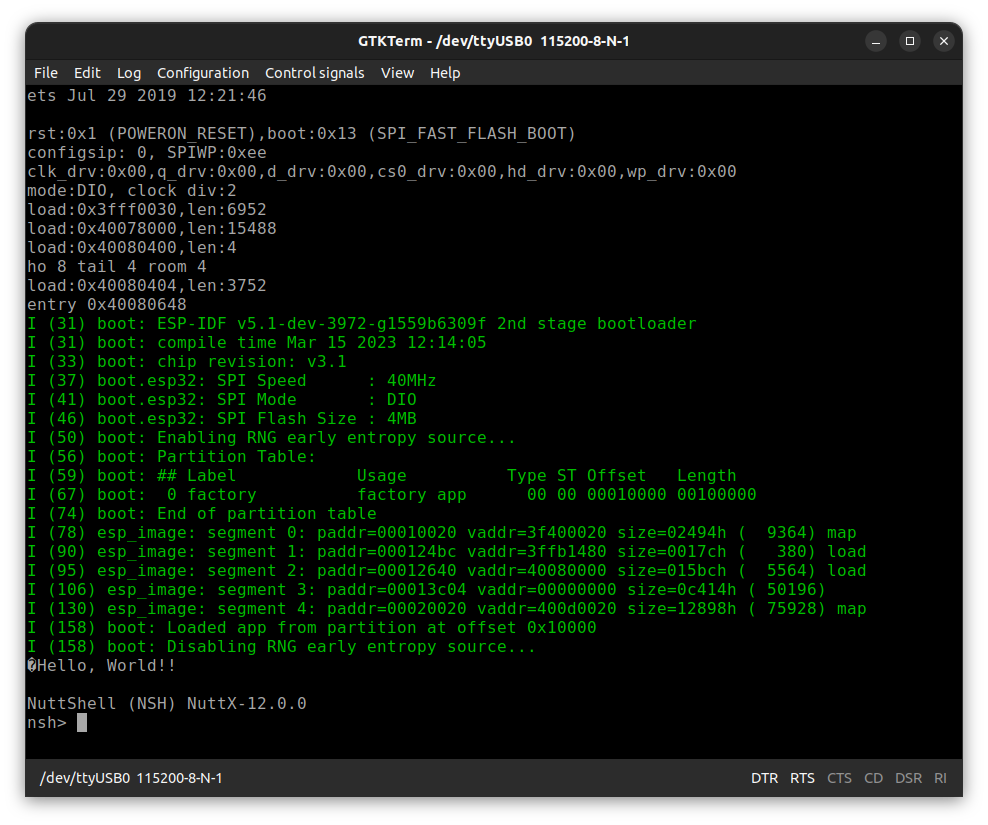
作成したプロジェクト
ターゲットを起動(電源ON)すると、”Hello, World!!” とコンソールに出力するプログラムとなります。
ビルド方法(build.sh)、FlushROMへの書き込み方法
READMEの通りですが、ここに日本語で解説します。
ビルドスクリプトは build.sh にまとめました。 Prerequisitesに記載した環境の要件を満たしていればそのまま実行してビルドできるはずです。 別途作成したビルド用Dockerコンテナ(Builder)を使ってビルドする手順となっています。 DockerfileへのリンクはREADMEに記載しています。
FlushROMへの書き込み方法は、venv を使ったPython仮想環境に esptool をインストールして行う手順となっています。 これにより、任意のesptoolのバージョンを使うことができます。
build.sh の説明
ハードウェアの定義
nuttxのソースの boards/boards のディレクトリ名に基づきます。 こちらを変更することで、他のキットにも対応できるはずです。
ESP32_MODULE_NAME=esp32 ESP32_BOARD_NAME=esp32-devkitc
ディレクトリ名、シンボル名等の定義
src/hello にユーザープログラムを格納します。
NuttXのビルドは、下記の名称にて並べてディレクトリを配置し、nuttx以下で make を実行するというのが定められた方法です。
- incubator-nuttx -> nuttx
- incubator-nuttx-apps -> apps
これに基づき、下記のように設定します。
MY_APP_NAME=hello BUILD_PREFIX_DIR=src MY_APP_DIR=${BUILD_PREFIX_DIR}/${MY_APP_NAME} NUTTX_DIR=${BUILD_PREFIX_DIR}/nuttx NUTTX_GIT_URL=https://github.com/apache/incubator-nuttx NUTTX_GIT_TAG=nuttx-12.0.0 NUTTX_APPS_DIR=${BUILD_PREFIX_DIR}/apps NUTTX_APPS_GIT_URL=https://github.com/apache/incubator-nuttx-apps NUTTX_APPS_GIT_TAG=nuttx-12.0.0 NUTTX_APPS_EXTERNAL_DIR=${NUTTX_APPS_DIR}/external
引数による処理
build.sh の引数として、allclean/clean/configure/build を用意しました。 指定しない場合には、configure/build を順に実行します。
case "$1" in allclean) allclean ;; clean) clean ;; configure) configure ;; build) build ;; *) configure build ;; esac
configure(nuttx、appsのclone)
指定されたタグのソースコードをcloneします。
# clone incubator-nuttx if [ ! -d ${NUTTX_DIR} ]; then mkdir -p $(dirname ${NUTTX_DIR}) git clone ${NUTTX_GIT_URL} -b ${NUTTX_GIT_TAG} ${NUTTX_DIR} fi # clone incubator-nuttx-apps if [ ! -d ${NUTTX_APPS_DIR} ]; then mkdir -p $(dirname ${NUTTX_APPS_DIR}) git clone ${NUTTX_APPS_GIT_URL} -b ${NUTTX_APPS_GIT_TAG} ${NUTTX_APPS_DIR} fi
configure(ビルトインアプリケーションの作成)
上記投稿に記載の通り、apps(incubator-nuttx-apps)以下にディレクトリを作成し、ソースファイルと設定ファイルを置いてビルドすることで、ビルトインアプリケーションを作成することができます。 今回の場合、NuttXシェル(nsh)から”hello”と入力することで、”Hello, World!!”が出力されるようなものとなります。 ただ、appsディレクトリに直接ファイルを作成するのはスマートではありません。
appsディレクトリに external ディレクトリを作成し、Makefile と makde.defs を作成することで、external/ 以下にあるディレクトリをアプリケーションとしてビルドすることができます。 テクニックとして、自分で作成したアプリケーションのソースコードディレクトリを、ここにシンボリックリンクとして配置するのがスマートです。
cloneしたappsディレクトリに対し、下記の通り必要なファイルを作成し、シンボリックリンクを作成します。
# apps/external setting if [ ! -d ${NUTTX_APPS_EXTERNAL_DIR} ]; then mkdir -p ${NUTTX_APPS_EXTERNAL_DIR} cat << 'EOS' > ${NUTTX_APPS_EXTERNAL_DIR}/Makefile MENUDESC = "External" include $(APPDIR)/Directory.mk EOS cat << 'EOS' > ${NUTTX_APPS_EXTERNAL_DIR}/Make.defs include $(wildcard $(APPDIR)/external/*/Make.defs) EOS fi if [ ! -d ${NUTTX_APPS_EXTERNAL_DIR}/${MY_APP_NAME} ]; then ln -s $(pwd)/${MY_APP_DIR} ${NUTTX_APPS_EXTERNAL_DIR}/${MY_APP_NAME} fi
configure(configure.sh、kconfig)
nuttxディレクトリに入り、configure と kconfig の設定を行います。
cd ${NUTTX_DIR} ./tools/configure.sh -l esp32-devkitc:nsh kconfig-tweak --file .config --enable CONFIG_BOARDCTL_ROMDISK kconfig-tweak --file .config --set-str CONFIG_NSH_SCRIPT_REDIRECT_PATH "" kconfig-tweak --file .config --set-val CONFIG_FS_ROMFS_CACHE_FILE_NSECTORS 1 kconfig-tweak --file .config --disable CONFIG_NSH_CONSOLE_LOGIN kconfig-tweak --file .config --enable CONFIG_FS_ROMFS kconfig-tweak --file .config --enable CONFIG_NSH_ROMFSETC kconfig-tweak --file .config --enable CONFIG_NSH_ARCHROMFS kconfig-tweak --file .config --enable CONFIG_FS_FAT kconfig-tweak --file .config --enable CONFIG_APP_HELLO kconfig-tweak --file .config --set-val CONFIG_APP_HELLO_PRIORITY 100 kconfig-tweak --file .config --set-val CONFIG_APP_HELLO_STACKSIZE 2048
configure(NuttX ビルトインアプリケーションの自動起動)
前述の通りビルトインアプリケーションはコマンドとして実行できますが、起動時に自動的に”Hello, World!!”を表示したいと思います。 これを行うためには、NuttXのファイルシステム上の /etc/init.d/rcS に、下記のように記載する必要があります。
#! /bin/nsh hello
nuttx/ ディレクトリに用意されているツールを実行します。
cd boards/xtensa/esp32/esp32-devkitc/include if [ -e rc.sysinit.template ]; then rm rc.sysinit.template fi if [ -e rcS.template ]; then rm rcS.template fi touch rc.sysinit.template touch rcS.template echo "#! /bin/nsh" > rcS.template echo "hello" >> rcS.template ../../../../../tools/mkromfsimg.sh ../../../../../ cd ../../../../..
FlushROMへの書き込み方法
wget で bootloader-esp32.bin と partition-table-esp32.bin を src/nuttx/ にダウンロードします。
次に、venv を使ったPython仮想環境に esptool をインストールし、上記のbinファイルとnuttx.binを合わせて書き込みます。
仮想環境(venvディレクトリ)を作った後は、”. venv/bin/activate” と “deactivate” を実行して通常の環境と仮想環境を切り替えて使用することができます。
おわりに
シングルボードコンピュータでのソフトウェア開発を行うのはいろいろとノウハウが必要です。 Arduinoなどはかなりよくできていて、手順通りやれば動かせるようになっていますが、OSSのRTOSを使って同様のことを行おうとするとなかなかハードルが高いです。 環境は限定されるものの、今回、手順通りやれば動かせる、というものを作成できたと考えています。